by
Rob Tice
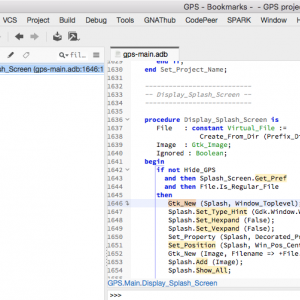
SPARKZumo Part 2: Integrating the Arduino Build Environment Into GPS
This is part #2 of the SPARKZumo series of blog posts. This post covers the build system that was used to build the SPARKZumo project and how to automate the process in GPS.