Getting Rid of Rust with Ada
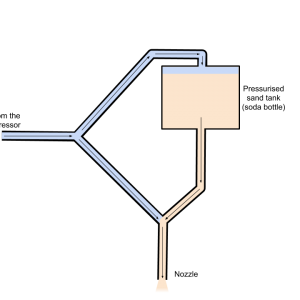
There are a lot of DIY CNC projects out there (router, laser, 3D printer, egg drawing, etc.), but I never saw a DIY CNC sandblaster. So I decided to make my own.
11 entries tagged with #ARM
There are a lot of DIY CNC projects out there (router, laser, 3D printer, egg drawing, etc.), but I never saw a DIY CNC sandblaster. So I decided to make my own.
Updated July 2018

The Adaroombot project consists of an iRobot CreateⓇ 2 and Ada running on a Raspberry Pi with a Linux OS. This is a great Intro-to-Ada project as it focuses on a control algorithm and a simple serial communications protocol. The iRobot CreateⓇ 2 platform was originally design for STEM education and has great documentation and support - making it very easy to create a control application using Ada. This blog looks at the creation of the project and some cool features of Ada that were learned along the way.
A few weeks ago one of my colleagues shared this kickstarter project : The Barisieur. It’s an alarm clock coffee maker, promising to wake you up with a freshly brewed cup of coffee every morning. I jokingly said “just give me an espresso machine and I can do the same”. Soon after, the coffee machine is in my office. Now it is time to deliver :)
There are moments in life where you find yourself with an AdaFruit thermal printer in one hand, and an OpenMV camera in the other.
I started this project more than a year ago. It was supposed to be the first Make with Ada project but it became the most challenging from both, the hardware and software side.
AdaCore continues to build reliable and secure software for embedded software development tools. Last month, we attended Embedded World 2016, one of the largest conferences of its kind in Europe, to present our embedded solutions and our expertise for safety, and mission critical applications in a variety of domains.

A step by step tutorial to adapt the ARM runtime to new MCUs/boards.
We are continuing to develop tools for use within projects that require reliable and secure embedded software for ARM. Our engineering team have been busy creating demos running on ARM technology, such as Tetris in SPARK on ARM Cortex M4.
I was at Bruxelles on January 31st to present the components of GNAT GPL 2015 : SPARK 2014 and GNAT GPL for ARM bare-board. This is not unrelated to a previous blog entry on Tetris in SPARK on ARM Cortex M4, in particular I presented that Tetris demo (I brought some boards with me and despite the simple package, none were broken!). The slides contain technical details on the ravenscar profile (main principles), how to build a program for the stm32f4-discovery board and how to port the runtime. There are also less technical slides such as why we choose the stm32f4 board and photos of some graphical demos. As that could be useful to anyone interested in Ravenscar or in porting the runtime to other boards or other platforms, we've made the slides available here.
Tetris is a well-known game from the 80's, which has been ported in many versions to all game platforms since then. There are even versions of Tetris written in Ada. But there was no version of Tetris written in SPARK, so we've repaired that injustice. Also, there was no version of Tetris for the Atmel SAM4S ARM processor, another injustice we've repaired.