by
Pat Rogers

Ada in Practice, a New Learn Course
A new Learn course is now available, focusing on how to use the Ada language to express common idioms, both language-dependent and -independent.

Dr. Patrick Rogers has been a computing professional since 1975, primarily working on embedded real-time applications including high-fidelity flight simulators and Supervisory Control and Data Acquisition (SCADA) systems controlling hazardous materials. He was director of the Ada9X Laboratory for the U.S. Air Force’s Joint Advanced Strike Technology Program, Principal Investigator in distributed systems and fault tolerance research projects using Ada for the U.S. Air Force and Army, and Associate Director for Research at the NASA Software Engineering Research Center. As a member of the Senior Technical Staff at AdaCore, he specializes in supporting real-time/embedded application developers, develops bare-board products and demonstrations, and creates training courses and presentations. He serves as Convenor of ISO/IEC JTC 1/SC 22/WG 9, the group responsible for the Ada standard.
10 entries written by Pat Rogers
A new Learn course is now available, focusing on how to use the Ada language to express common idioms, both language-dependent and -independent.
This blog entry shows how to define protected types that extend the language-defined priority inheritance for protected actions to the statements outside those protected actions. We create a mutex type for illustration.

A new online Learn course has been published offering an Introduction To Embedded Systems Programming.

This blog entry shows how to define an abstract data type that allows tasks to block on objects of the type, waiting for resumption signals from other components, for at most a specified amount of time per object. This "timeout" capability has been available in Ada from the beginning, via select statements containing timed entry calls. But what about developers working within the Ravenscar and Jorvik tasking subsets? Select statements and timed calls are not included within either profile. This new abstraction will provide some of the functionality of timed entry calls, with an implementation consistent with the Ravenscar and Jorvik subsets.

The Ada 2022 draft defines a new tasking profile named Jorvik (pronounced “Yourvick”), based directly on the standard Ravenscar profile. Jorvik relaxes certain restrictions in order to increase expressive power for real-time/embedded Ada and SPARK applications. We will explore the details in this blog entry.

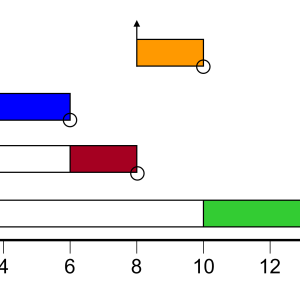
Ada has a concurrency construct known as “entry families” that, in some cases, is just what we need to express a concise, clear solution.

This blog entry describes the transformation of an Ada stack ADT into a completely proven SPARK implementation that relies on static verification instead of run-time enforcement of the abstraction’s semantics. We will prove that there are no reads of unassigned variables, no array indexing errors, no range errors, no numeric overflow errors, no attempts to push onto a full stack, no attempts to pop from an empty stack, that subprogram bodies implement their functional requirements, and so on. As a result, we get a maximally robust implementation of a reusable stack abstraction providing all the facilities required for production use.

As a demonstration for the use of Ada and SPARK in very small embedded targets, I created a remote-controlled (RC) car using Lego NXT Mindstorms motors and sensors but without using the Lego computer or Lego software. I used an ARM Cortex System-on-Chip board for the computer, and all the code -- the control program, the device drivers, everything -- is written in Ada. Over time, I’ve upgraded some of the code to be in SPARK. This blog post describes the hardware, the software, the SPARK upgrades, and the repositories that are used and created for this purpose.
The Ada Drivers Library (ADL) is a collection of Ada device drivers and examples for ARM-based embedded targets. The library is maintained by AdaCore, with development originally (and predominantly) by AdaCore personnel but also by the Ada community at large. It is available on GitHub and is licensed for both proprietary and non-proprietary use.
One of the interesting aspects of developing software for a bare-board target is that displaying complex application-created information typically requires more than the target board can handle. Although some boards do have amazing graphics capabilities, in some cases you need to have the application on the target interact with applications on the host. This can be due to the existence of special applications that run only (or already) on the host, in particular.